
RidgeRun Video Stabilization Library/Useful Links/BMI160 Setup: Difference between revisions
No edit summary |
|||
| Line 1: | Line 1: | ||
<noinclude> | |||
{{RidgeRun Video Stabilization Library/Head|previous=Useful Links|next=Contact_Us|metakeywords=imu,stabilizer,rb5,jetson,nvidia,xilinx,amd,qualcomm}} | |||
</noinclude> | |||
{{DISPLAYTITLE:Useful Links - BMI160 Setup|noerror}} | |||
== BMI160 sensor setup == | == BMI160 sensor setup == | ||
The BMI160 sensor has 12 pins, as shown in the picture below. To use it, connect the VIN pin to a 3.3V signal, the GND pin to ground (0V), the SCL pin to the I2C clock, and the SDA pin to an I2C data pin. For example, refer to the Expansion Header Connections of the NVIDIA Jetson Nano Developer Kit shown below. In this case, the connections should be made as illustrated in the last image. | The BMI160 sensor has 12 pins, as shown in the picture below. To use it, connect the VIN pin to a 3.3V signal, the GND pin to ground (0V), the SCL pin to the I2C clock, and the SDA pin to an I2C data pin. For example, refer to the Expansion Header Connections of the NVIDIA Jetson Nano Developer Kit shown below. In this case, the connections should be made as illustrated in the last image. | ||
<gallery widths="400px" heights="300px | <gallery widths="400px" heights="300px"> | ||
File:Bmi160-sensor.png|BMI160 sensor (taken from [https://spintend.com/products/bmi-160-module-for-diy-balanced-board-with-vesc here]). | File:Bmi160-sensor.png|BMI160 sensor (taken from [https://spintend.com/products/bmi-160-module-for-diy-balanced-board-with-vesc here]). | ||
File:Expansion-header-jetson-nano.png|Expansion Header Connections of a Jetson Nano (taken from [https://pbrobinson.fedorapeople.org/SP-09732-001_v1.1.pdf here]). | File:Expansion-header-jetson-nano.png|Expansion Header Connections of a Jetson Nano (taken from [https://pbrobinson.fedorapeople.org/SP-09732-001_v1.1.pdf here]). | ||
File:Bmi160-setup.png|Connection of a BMI160 sensor. | File:Bmi160-setup.png|Connection of a BMI160 sensor. | ||
</gallery> | </gallery> | ||
<noinclude> | |||
{{RidgeRun Video Stabilization Library/Foot|Useful Links|Contact_Us}} | |||
</noinclude> | |||
Revision as of 15:16, 12 June 2024
 | RidgeRun Video Stabilization Library RidgeRun documentation is currently under development. |
Table of Contents
[Sticky]

|
BMI160 sensor setup
The BMI160 sensor has 12 pins, as shown in the picture below. To use it, connect the VIN pin to a 3.3V signal, the GND pin to ground (0V), the SCL pin to the I2C clock, and the SDA pin to an I2C data pin. For example, refer to the Expansion Header Connections of the NVIDIA Jetson Nano Developer Kit shown below. In this case, the connections should be made as illustrated in the last image.
-

BMI160 sensor (taken from here).
-
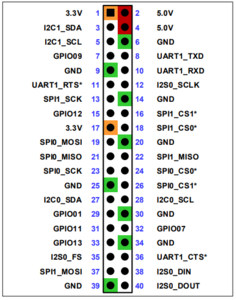
Expansion Header Connections of a Jetson Nano (taken from here).
-
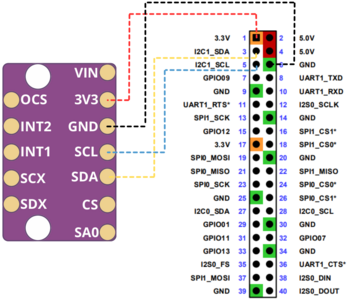
Connection of a BMI160 sensor.


