
Holoscan Framework/Holoscan Sensor Bridge/Hardware Connection: Difference between revisions
No edit summary |
No edit summary |
||
| (13 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
<noinclude> | |||
{{Holoscan Framework/Head|previous=Holoscan Sensor Bridge/Architecture|next=Holoscan Sensor Bridge/Bring Up Process|metakeywords=nvidia,holoscan,low latency,capture,camera,fpga}} | |||
</noinclude> | |||
{{DISPLAYTITLE:Hardware Connection|noerror}} | |||
=== Hardware Required === | === Hardware Required === | ||
| Line 4: | Line 11: | ||
<ol> | <ol> | ||
<li> NVIDIA Jetson Orin AGX | <li> NVIDIA Jetson Orin AGX | ||
[[File:Jetson1.png| | [[File:Jetson1.png|250px|thumb|center|NVIDIA Jetson Orin AGX. Source: [https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-orin/ NVIDIA]]] | ||
<li> NVIDIA Holoscan Sensor Bridge | <li> NVIDIA Holoscan Sensor Bridge | ||
[[File:Bajoran-001.jpg| | [[File:Bajoran-001.jpg|300px|thumb|center|Holoscan Sensor Bridge. Source: [https://www.latticesemi.com/products/designsoftwareandip/intellectualproperty/referencedesigns/referencedesigns05/lattice-nvidia-edge-ai Lattice Semiconductor]]] | ||
<li>Jetson-IMX274-Dual Cameras | <li>Jetson-IMX274-Dual Cameras | ||
[[File:LI-JETSON-IMX274-DUAL-5.jpg| | [[File:LI-JETSON-IMX274-DUAL-5.jpg|250px|thumb|center|li-jetson-imx274-dual. Source: [https://pdf1.alldatasheet.es/datasheet-pdf/view/1139848/LEOPARD/LI-JETSON-IMX274-DUAL.html Leopard Imaging Inc] ]] | ||
<li> 10Gtek Ethernet Adaptor | |||
<li> Ethernet Cable | |||
<li> USB A to USB C cable | |||
=== Connection Diagram === | === Connection Diagram === | ||
Here you can find a diagram describing the connection required. | |||
[[File:Harware diagram1.png|300px|thumb|center|Hardware Diagram Connection]] | |||
=== Host Set Up === | === Host Set Up === | ||
Use the following steps to set up the hardware requirements. | |||
<ol> | |||
<li> Install '''git-lfs''' | |||
<syntaxhighlight line lang=bash> | |||
sudo apt-get update | |||
sudo apt-get install -y git-lfs | |||
</syntaxhighlight> | |||
<li> Enable larger network receiver buffers. | |||
<syntaxhighlight line lang=bash> | |||
echo 'net.core.rmem_max = 31326208' | sudo tee /etc/sysctl.d/52-hololink-rmem_max.conf | |||
sudo sysctl -p /etc/sysctl.d/52-hololink-rmem_max.conf | |||
</syntaxhighlight> | |||
<li> Configure a static address the IP for the eth0 port. | |||
<syntaxhighlight line lang=bash> | |||
sudo nmcli con add con-name hololink-eth0 ifname eth0 type ethernet ip4 192.168.0.101/24 | |||
sudo nmcli connection up hololink-eth0 | |||
</syntaxhighlight> | |||
<li> Go to '''/boot/extlinux/extlinux.conf''' and add | |||
<syntaxhighlight line lang=bash> | |||
isolcpus=2 | |||
</syntaxhighlight> | |||
At the end of the line that starts with '''APPEND'''. | |||
If you need more detailed information about the Hardware set up use the following [https://docs.nvidia.com/holoscan/sensor-bridge/1.0.0/concord_l4t_linux_sock_deployment.html Link]. | |||
<br><br><br> | |||
{{FPGA Expert Minutes/RidgeRun Services}} | |||
<noinclude> | |||
{{Holoscan Framework/Foot|Holoscan Sensor Bridge/Architecture|Holoscan Sensor Bridge/Bring Up Process}} | |||
</noinclude> | |||
Latest revision as of 20:01, 22 July 2024
 | Holoscan Framework RidgeRun documentation is currently under development. |
| Holoscan Framework |
|---|
| Basics and Foundations |
|
| Holoscan Sensor Bridge |
|
| DPDK Framework |
| Contact Us |

|
Hardware Required
Here you can find a list with the hardware required
- NVIDIA Jetson Orin AGX

NVIDIA Jetson Orin AGX. Source: NVIDIA - NVIDIA Holoscan Sensor Bridge

Holoscan Sensor Bridge. Source: Lattice Semiconductor - Jetson-IMX274-Dual Cameras

li-jetson-imx274-dual. Source: Leopard Imaging Inc - 10Gtek Ethernet Adaptor
- Ethernet Cable
- USB A to USB C cable
Connection Diagram
Here you can find a diagram describing the connection required.
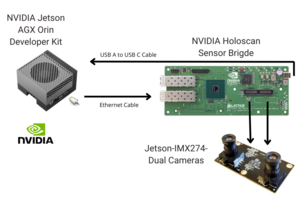
Hardware Diagram Connection Host Set Up
Use the following steps to set up the hardware requirements.
- Install git-lfs
sudo apt-get update sudo apt-get install -y git-lfs
- Enable larger network receiver buffers.
echo 'net.core.rmem_max = 31326208' | sudo tee /etc/sysctl.d/52-hololink-rmem_max.conf sudo sysctl -p /etc/sysctl.d/52-hololink-rmem_max.conf
- Configure a static address the IP for the eth0 port.
sudo nmcli con add con-name hololink-eth0 ifname eth0 type ethernet ip4 192.168.0.101/24 sudo nmcli connection up hololink-eth0
- Go to /boot/extlinux/extlinux.conf and add
isolcpus=2
At the end of the line that starts with APPEND.
If you need more detailed information about the Hardware set up use the following Link.
RidgeRun Services
RidgeRun has expertise in offloading processing algorithms using FPGAs, from Image Signal Processing to AI offloading. Our services include:
- Algorithm Acceleration using FPGAs.
- Image Signal Processing IP Cores.
- Linux Device Drivers.
- Low Power AI Acceleration using FPGAs.
- Accelerated C++ Applications.
And it includes much more. Contact us at https://www.ridgerun.com/contact.
- Install git-lfs



